Enhancing Robotic Vision Through Engineered Motion Blur
Capturing clear images in low-light, low-contrast environments is inherently challenging, as cameras must rely on extended exposure times to accumulate sufficient light on the sensor. However, this approach introduces a significant drawback: even the slightest movement whether from the camera itself or the background can cause motion blur, potentially masking critical details such as cracks or corrosion. To address this, robotic platforms are often designed to hold position and capture multiple sequential shots. While this method can enhance image clarity, it comes at the cost of increased resource consumption and longer inspection times.
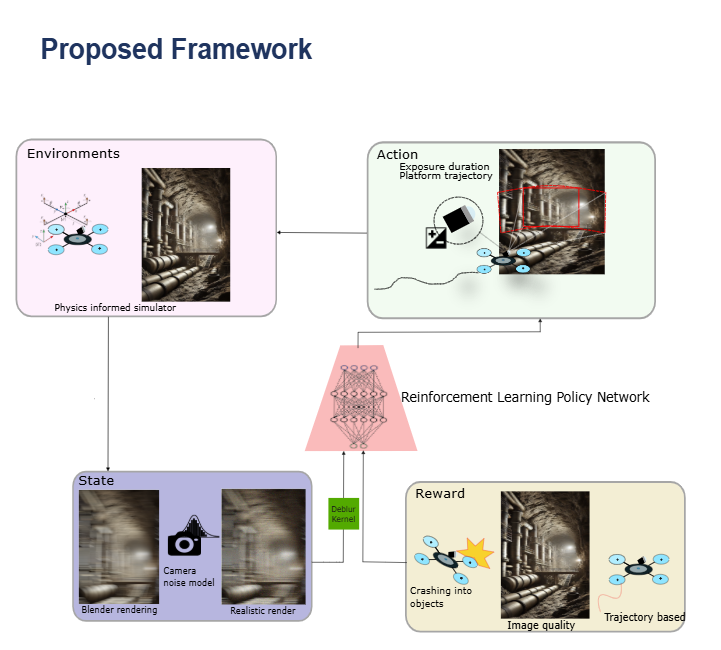
Moreover, in environments with rapid contrast shifts, the strategy of taking multiple shots may fall short, failing to produce consistent results and potentially obscuring critical information. Traditionally, motion blur is treated as a post-imaging problem to be resolved after capture, a process that becomes complex and ineffective in dynamic environments with varying motion patterns. Building upon the principles of motion-invariant photography, which demonstrates that controlled camera motion during exposure can produce structured blur that is non-destructive to information and can be deblurred using a single blur kernel, our research aims to enhance robotic vision by engineering motion blur. We employ reinforcement learning to generate optimized camera trajectories and exposure durations, ensuring the captured blur is structured and thus can be deblurred.
The trajectories control the blur and exposure, thus making the images more informative after processing. By allowing robotic platforms to navigate seamlessly without frequent halts, the approach significantly improves inspection efficiency. It is particularly valuable for challenging environments such as ballast tanks, mines, confined spaces, or poorly lit areas, advancing robotic inspections across various industries.
Research Activities
- Environment and Pipeline Design:
Developing a simulation pipeline that replicates realistic inspection environments, incorporating motion blur, physics-based interactions, and noise models. - Motion and Exposure Optimization:
Designing algorithms to optimize robotic motion and camera exposure, generating structured blur that is non-destructive to information and can be deblurred using a single blur kernel. - Reinforcement Learning for Motion Control:
Employing reinforcement learning to develop control policies and reward structures that enable robotic platforms to autonomously navigate environments, avoid collisions, and execute motion and exposure parameters for engineered blur capture. - Validation:
Testing the approach in real-world environments to ensure robust performance across diverse and challenging conditions.
Expected Impact:
- Enhanced Inspection Efficiency: The approach reduces the need for frequent motion pauses or stopping, enabling robotic platforms to cover more inspection area within given time constraints. This results in more comprehensive coverage and faster completion of inspection tasks.
- Image Quality Optimization: By engineering specific platform trajectories during extended exposures, the system optimizes light gathering while ensuring blur patterns remain computationally reversible. This approach enables effective inspections in low-light and low-contrast environments without compromising image quality or requiring additional illumination. The resulting enhancement in visual data collection opens new possibilities for robotic inspection in challenging environments that were previously difficult to assess.
- Broad Industrial Applicability: This methodology can be applied across various industries including maritime (ship hull inspections), mining (tunnel safety assessments), and infrastructure (bridge and dam examinations). It enables reliable inspections in challenging environments characterized by confined spaces, poor lighting, or dynamic conditions that traditionally pose significant inspection challenges.
Associated Researchers
-
Don Dansereau
Theme Lead - Sensing and Perception
View Bio -
Alexandre Cardaillac
Postdoctoral Fellow
View Bio