Visual Place Recognition for Localisation and Navigation in the Underwater Domain
The management of underwater assets is a challenging process requiring navigation around large structures to collect data in harsh and ever-changing conditions. Due to the inherent difficulties of this work the application of unmanned technologies has been essential in reducing the associated costs and dangers. A critical capability required for these technologies is to perform reliable navigation and mapping of the asset irrespective of the condition of the asset and surrounding environment. This is often done through a process known as simultaneous localisation and mapping (SLAM). However, errors in the internal and external sensors as well as the lack of ground truth values from the absence of GPS underwater, can cause significant compounding errors and positional drift over time, leading to inaccuracies in the navigation and subsequent maps produced during deployments.
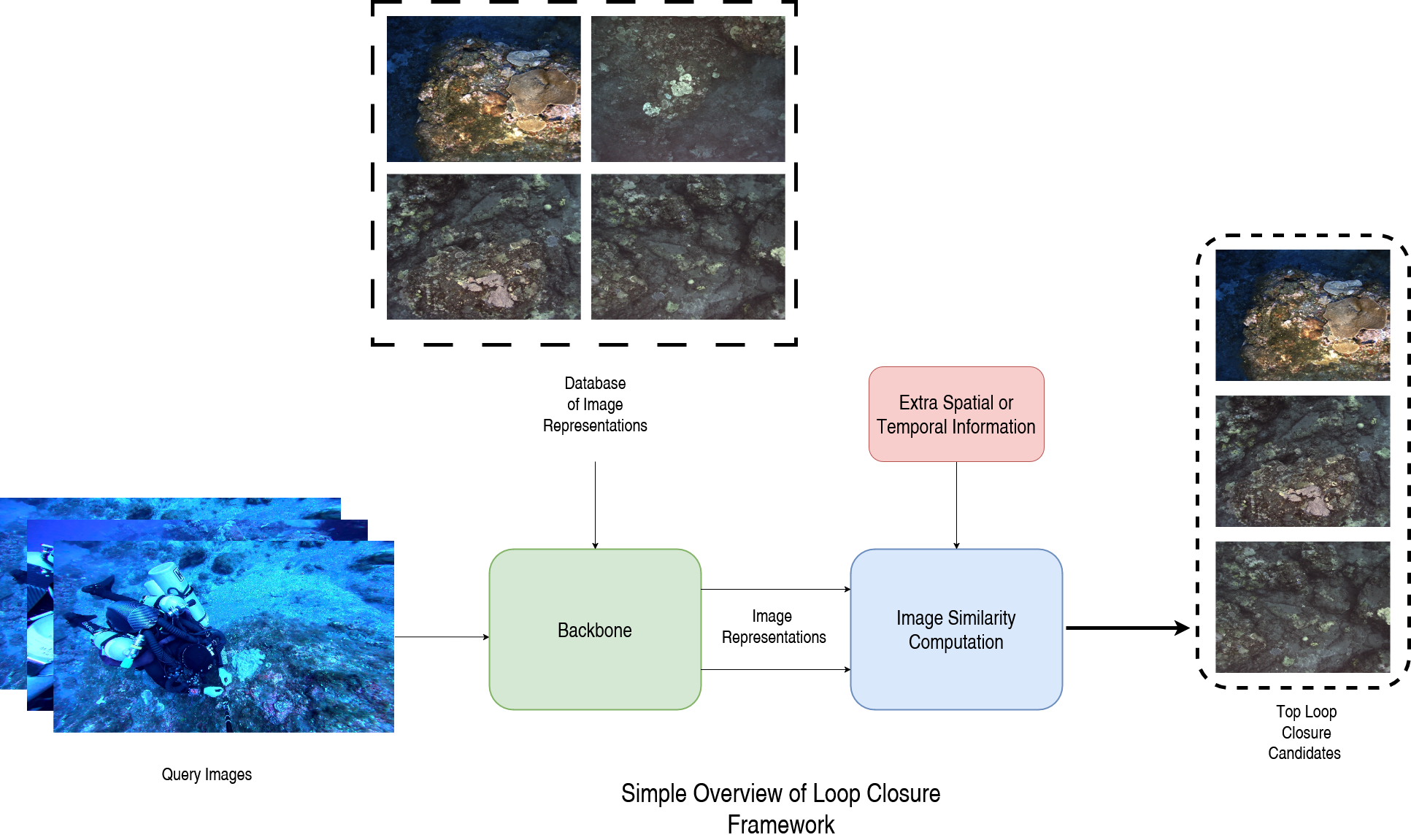
One effective way to mitigate these issues is by leveraging visual data to recognise previously visited locations, thereby helping to correct drift in the platform’s position estimate and constraining the trajectory. This is known as loop closure and is an essential part of many mobile robotic systems. However, the underwater domain poses unique challenges such as changing visibility, poor lightning conditions, perceptual aliasing and lack of ground truths data that limits the accuracy of algorithms designed for non-underwater applications. The aim of this project is to develop tools and methods to overcome these problems, enabling more reliable and accurate navigation and mapping, and improving the autonomous monitoring of underwater assets.
Research Activities:
- Understand the challenges of the underwater environment and how it can affect image representations.
- Identify failure cases and how existing algorithms fail to adapt to underwater environments.
- Produce better image representations and comparison methods to determine if two images are taken from the same place.
- Combine multimodal data to improve its robustness under harsh conditions.
- Validate proposed models during field deployments of Autonomous Underwater Vehicles.
Expected Impact:
This research aims to improve the monitoring and management of underwater assets using autonomous underwater vehicles. Through improving platforms capability to navigate and map assets under challenging environments, a better understanding of the assets’ state and areas of concern can be identified and properly resolved.
The outcomes of this project can be leveraged in both industry and scientific contexts. It will enable the reduction of operational costs and human intervention when maintaining ship hulls or offshore structures as well as supporting more accurate and reliable data collection for the monitoring of marine ecosystems. This work aligns with the Hub’s mission of advancing robotic capabilities to improve the autonomous management of key assets.
Associated Researchers
-
Stefan Williams
Deputy Director - Technology & Impact
View Bio -
Alexandre Cardaillac
Postdoctoral Fellow
View Bio