Skip to content
Home
About
About Us
Our Team
Partners
Research
Planning and Control
Sensing and Perception
Mapping and Insights
News and Events
News
Events
Our Launch
AUSROS
Opportunities
Contact
Home
About
About Us
Our Team
Partners
Research
Planning and Control
Sensing and Perception
Mapping and Insights
News and Events
News
Events
Our Launch
AUSROS
Opportunities
Contact
Archives:
Project
Holds projects
Underwater 3D Perception for Robotic Manipulation
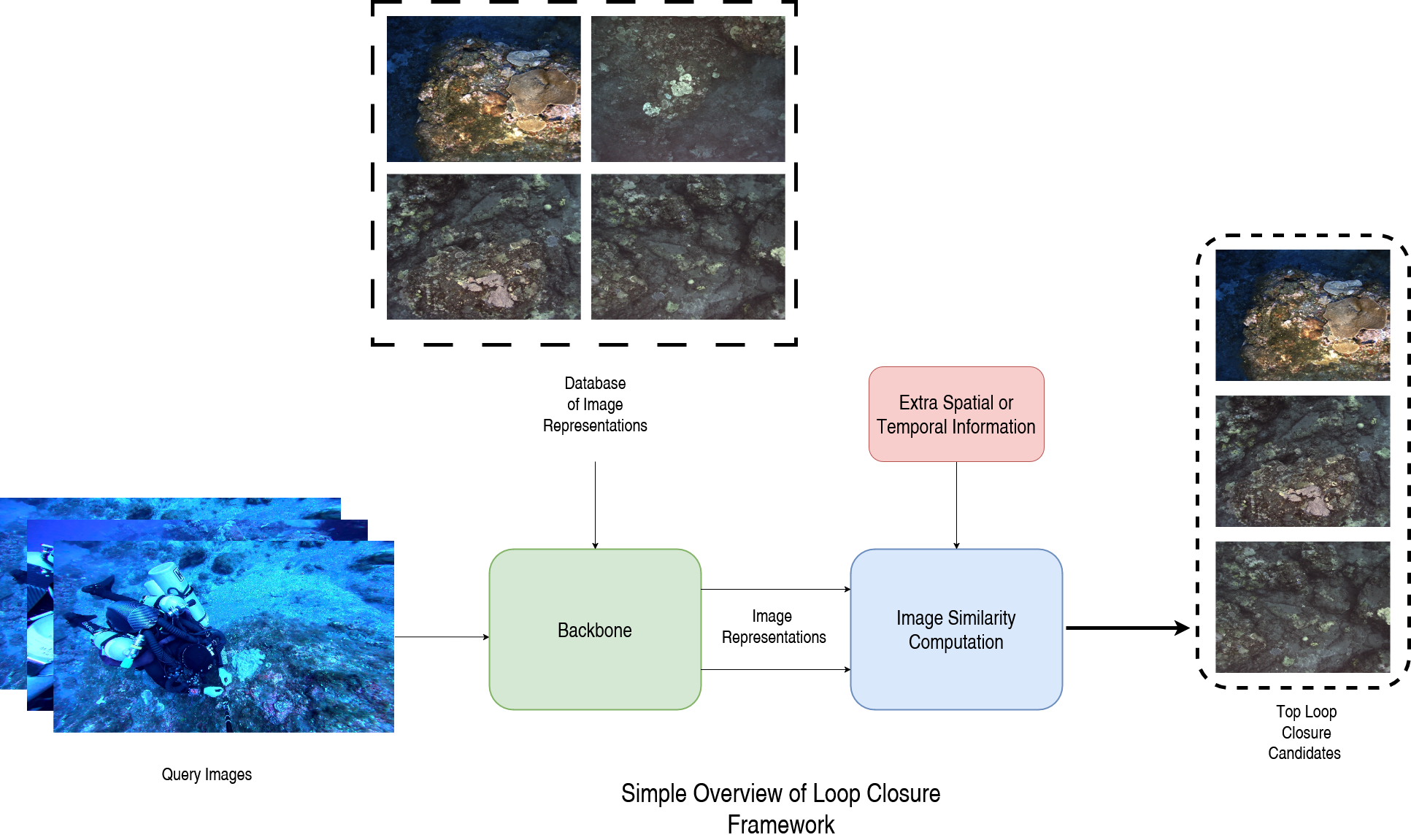
Visual Place Recognition for Localisation and Navigation in the Underwater Domain
Enhancing Robotic Vision Through Engineered Motion Blur
Manipulating to see better: sensing for underwater inspection with manipulation
TEST Project T2.P1: Low-level sensor reconfiguration as part of the planning process
Posts navigation
Newer posts
Message Us
Company
This field is for validation purposes and should be left unchanged.
Name
(Required)
Email
(Required)
Message
CAPTCHA